|
解決方案
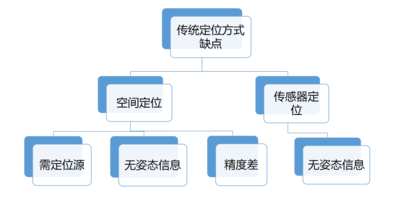
智造之眼丨多目標(biāo)定位抓取作者:智眼小匠來(lái)源:智造之眼微信公眾號(hào) 專(zhuān)業(yè)做視覺(jué),認(rèn)真做研發(fā)。智造之眼視覺(jué)團(tuán)隊(duì)堅(jiān)持突破技術(shù),執(zhí)著產(chǎn)品,深入應(yīng)用,持之以恒的打造中國(guó)的視覺(jué)品牌,為世界提供又好又便宜的視覺(jué)產(chǎn)品和服務(wù)。 多目標(biāo)定位抓取:相機(jī)一次性拍攝多個(gè)目標(biāo)產(chǎn)品,視覺(jué)軟件進(jìn)行圖像分析定位,將像素坐標(biāo)轉(zhuǎn)換為物理坐標(biāo),系統(tǒng)傳遞多個(gè)產(chǎn)品的物理坐標(biāo)給機(jī)械手,機(jī)械手進(jìn)行多位置正確取放產(chǎn)品。 多目標(biāo)定位抓取優(yōu)勢(shì)
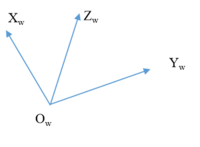
多目標(biāo)定位抓取相對(duì)傳統(tǒng)定位而言:可同時(shí)傳遞多個(gè)產(chǎn)品坐標(biāo)位姿信息給機(jī)械手實(shí)現(xiàn)多位置抓取,大大提升工業(yè)生產(chǎn)的速度和精度。 多目標(biāo)定位原理 坐標(biāo)轉(zhuǎn)換--四坐標(biāo)系之間轉(zhuǎn)換
世界坐標(biāo)系
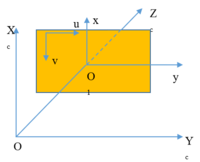
相機(jī)坐標(biāo)系、圖像坐標(biāo)系與像素坐標(biāo)系
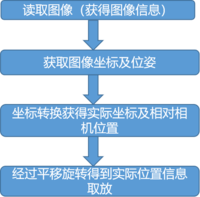
四坐標(biāo)系轉(zhuǎn)換關(guān)系 多目標(biāo)定位過(guò)程 視覺(jué)系統(tǒng)
轉(zhuǎn)換步驟
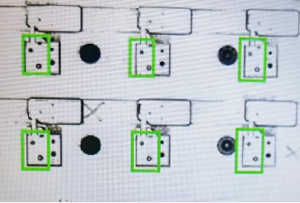
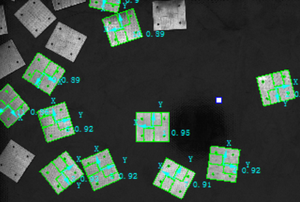
由此,機(jī)械手連接通訊獲得位置坐標(biāo),實(shí)現(xiàn)多目標(biāo)產(chǎn)品的定位抓取。 多目標(biāo)定位抓取-算法運(yùn)用 如何獲取產(chǎn)品特征信息? 1、特征值提取(圓、圓環(huán)、矩形等)
2、輪廓匹配法
3、模型匹配法等
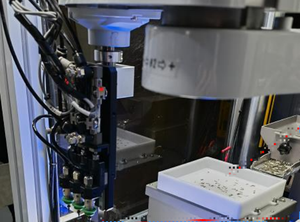
多目標(biāo)定位抓取-工業(yè)應(yīng)用 由于工業(yè)生產(chǎn)應(yīng)用類(lèi)型多樣,實(shí)際定位不僅需要定位產(chǎn)品的位置信息,還需要定位產(chǎn)品的姿態(tài)信息。 工業(yè)生產(chǎn)應(yīng)用類(lèi)型 1、柔性振動(dòng)盤(pán)機(jī)械手多位置抓取產(chǎn)品
2、多位置旋轉(zhuǎn)吸嘴多位置抓取
3、機(jī)械手四位置多產(chǎn)品抓取
智造之眼-應(yīng)用數(shù)據(jù) 檢測(cè)件:五金件 產(chǎn)品大小:約20X15mm 相機(jī)配置:500萬(wàn)~2000萬(wàn) 重復(fù)抓取精度:0.04mm 拍照處理速度:400~500ms 一次拍照定位數(shù)量:10~12pcs
聲明:此篇為棱鏡空間-智造之眼原創(chuàng)文章,轉(zhuǎn)載請(qǐng)標(biāo)明出處鏈接:http://www.yuoutong.cn/zzzy01.html
|